在路径追踪中,简单介绍了路径追踪的算法原理和实现方案,而在实际的渲染器中,基于递归的路径追踪算法通常是不会被采用的。路径追踪算法通常需要运行在GPU上,而GPU上不允许出现递归函数,这是GPU的硬件架构决定的,即使算法运行在CPU上,递归带来的性能损失依然无法接受。
这里对路径追踪算法进行更深入的研究,重点探索它的算法实现方案。资料来源于PBRT书籍。
光线传输方程(Light Transport Equation)
光线传输方程(LTE)用于描述场景中辐射率的分布,它通过物体表面自发光属性、BSDF以及到达该点的入射辐射率,计算出某一个点的反射辐射率。
基础理论
首先,LTE的基础是能量守恒定律。光线传输过程中,系统的输出能量与输入能量之差,等于系统的辐射能量与吸收能量之差。对于一个物体来说,离开它的能量,进入它的能量,它发射的能量和它吸收的能量之间满足以下关系。
在这个前提下,假设光线在传输过程中没有能量损耗,如下图所示,如果要计算p点在上的入射辐射率,只需计算沿方向上光线与场景的交点p’在方向的出射辐射率即可,如下图所示:
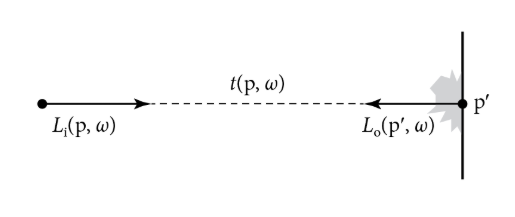
可以用公式来表示:
其中t表示光线投射函数(ray-casting function),用来计算光线(p, )在场景中的交点p’。
这样就可以把渲染方程写成如下形式:
这就是LTE方程。
通过规定场景中的能量守恒,就把这个方程左右两边的L统一了。
面积的LTE方程
LTE方程中目前还是带有太多的变量,为了方便,需要将对立体角的积分转换位对面积的积分。
首先,将辐射率的表示方法进行如下转换:
这表示从p’点传播到p点的辐射率。
同时,修改BRDF函数的表示方式:
这表示p’点的BRDF值,很明显这里,。
将立体角微分转换为面积微分
这是研究LTE方程的重要数学工具,在上面的LTE方程中,是对立体角进行积分,这里需要将其转换为对面积A的积分。
在立体角(solid angle)中介绍过,立体角的定义是
这是一个线性关系的函数,所以有
这里的面积A指的是立体角所在圆上的面积,而我们要计算场景中任意一点的面积,它并不位于圆上(其法线与立体角方向并不相同),如果用A’表示场景中任意一点p’处的面积,根据Lambert的余弦定理,有
其中表示p’处的法线与立体角的夹角。
Note
这里的严格来说应该是,要取绝对值,这里为了方便做了不严谨的简化,但是程序中肯定是不能计算出负数的面积或辐射率的
这样,立体角微分和面积微分的关系就可以表示出来了,
回到LTE方程,更近一步使用函数G来表示可见性加方程中的项,以及立体角微分转换面积微分的项,
其中V表示p点和p’点的可见性,为0时表示二者不可见,为1时表示二者可见。
表示p点法线与(p-p’)方向的余弦积(绝对值)。
’表示p‘点法线与(p-p’)方向的余弦积(绝对值)。
表示p点和p’点距离的平方。
通过这些表示,就可以使用面积的积分来表示LTE方程了,
p点表示观察点,也就是相机位置。
p’点是直接观察到的场景中的点。
p”点是对p’点有间接光照贡献的点。